We were approached by the Technical University of Applied Sciences Augsburg to create visuals for the celebratory opening of the Center for Technology Transfer in Landsberg. Topic of the event was the ongoing research in the region in the area of mobility. Their focus lies on the development of a resource saving combination of electric vehicles: self driving cars bring you to small scale airports where you continue your journey with autonomous flight services.
In collaboration with the Hybrid Things Lab of the University, who deal with future perspectives of human-machine interaction, we taught a robot to get a move on. Humans sometimes like to act robotic when dancing. Here we flipped the switch and turned the machine, originally engineered for perfectly precise movements in car factories, into a lively performer. Nicknamed »B-Bot«, a reference to B-Boys and B-Girls in breakdance culture, the bot's choreography becomes part of the scene it creates.
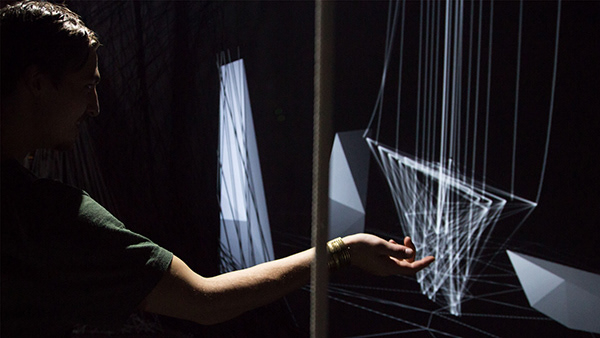
Equipped with a webcam, it generates visuals by filming a table full of prints and prototypes. Reminiscent of the DIY spirit of a makerspace, the work in progress is scattered around the bot. The raving camerawork transforms it into an abstract interpretation of transportation on the fragmented LED screens behind it.
Equipped with a webcam, it generates visuals by filming a table full of prints and prototypes. Reminiscent of the DIY spirit of a makerspace, the work in progress is scattered around the bot. The raving camerawork transforms it into an abstract interpretation of transportation on the fragmented LED screens behind it.
Thanks to Timo Holzmann and Olga Toltinova for letting us use their shots!







In order to realize the project within a short time period of three weeks we create a 3D room mockup in Blender. That helped the team to get a feel for the dimensions in the hall and allowed us arrange the the multiple exhibits, including electric cars and a supercomputer, in the space.
We also connected this model to the software Touchdesigner with a realtime camera connection. This way we could preview the imagery and iterate on it.
We also connected this model to the software Touchdesigner with a realtime camera connection. This way we could preview the imagery and iterate on it.